{'image': tensor([[[0.3059, 0.3059, 0.3098, ..., 0.3765, 0.3686, 0.3647],
[0.3020, 0.3020, 0.3098, ..., 0.3804, 0.3725, 0.3686],
[0.2941, 0.2980, 0.3059, ..., 0.3804, 0.3686, 0.3569],
...,
[0.4431, 0.4431, 0.4471, ..., 0.3373, 0.3333, 0.3333],
[0.4431, 0.4431, 0.4471, ..., 0.3373, 0.3333, 0.3294],
[0.4392, 0.4431, 0.4431, ..., 0.3412, 0.3333, 0.3294]],
[[0.3490, 0.3490, 0.3529, ..., 0.4275, 0.4196, 0.4157],
[0.3451, 0.3451, 0.3529, ..., 0.4314, 0.4235, 0.4196],
[0.3333, 0.3373, 0.3451, ..., 0.4314, 0.4196, 0.4078],
...,
[0.4941, 0.4941, 0.4980, ..., 0.3569, 0.3529, 0.3529],
[0.4941, 0.4941, 0.4980, ..., 0.3569, 0.3529, 0.3490],
[0.4902, 0.4941, 0.4941, ..., 0.3608, 0.3529, 0.3490]],
[[0.1922, 0.1922, 0.1961, ..., 0.3098, 0.3098, 0.3059],
[0.1882, 0.1882, 0.1961, ..., 0.3137, 0.3137, 0.3098],
[0.1882, 0.1922, 0.2000, ..., 0.3137, 0.3098, 0.2980],
...,
[0.4667, 0.4588, 0.4627, ..., 0.2314, 0.2275, 0.2275],
[0.4667, 0.4588, 0.4627, ..., 0.2314, 0.2275, 0.2235],
[0.4627, 0.4588, 0.4588, ..., 0.2353, 0.2275, 0.2235]]]),
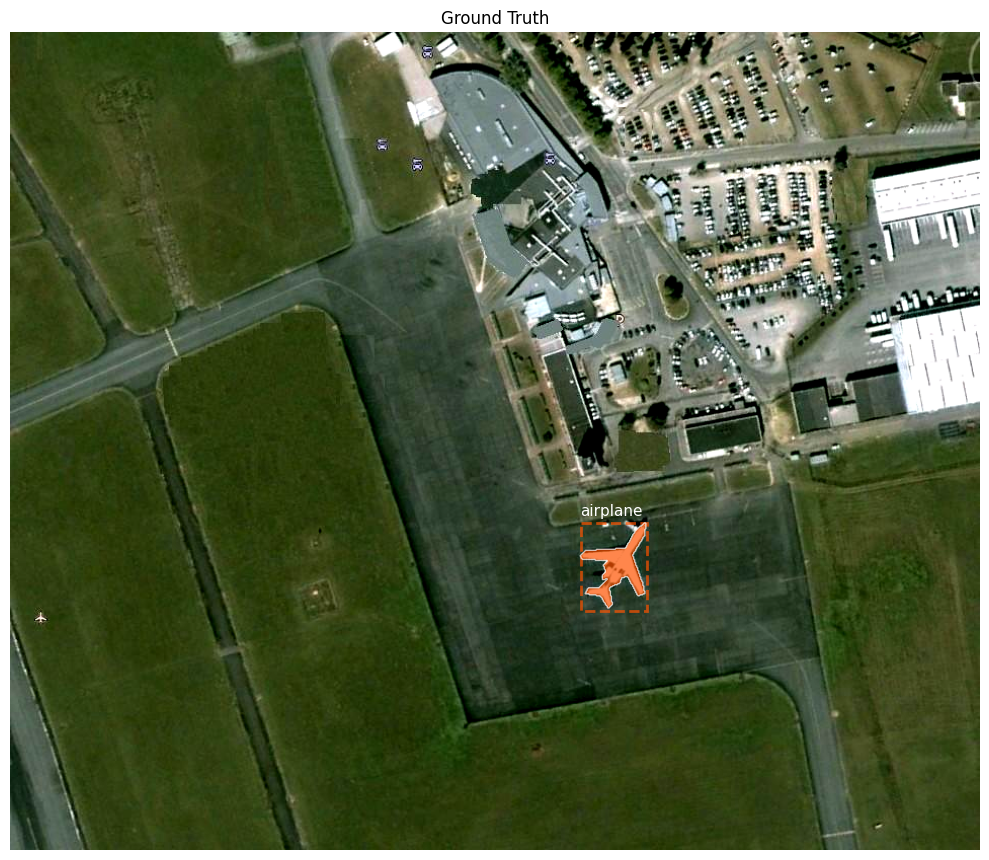
'boxes': tensor([[563., 485., 629., 571.]]),
'labels': tensor([1]),
'masks': tensor([[[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
...,
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0]]], dtype=torch.uint8),
'prediction_boxes': tensor([[559.5670, 481.6908, 630.8933, 570.8891]]),
'prediction_labels': tensor([1]),
'prediction_scores': tensor([0.9885]),
'prediction_masks': tensor([[[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]])}