Object Localization with Multi-View Consensus
sfm
3d-reconstruction
sam
geolocation
I had street-view images and the goal was to recover the exact map location of roadside objects so I could build a reliable asset database. I solved this with an SfM-assisted localization pipeline: first reconstruct camera poses and sparse 3D structure with SfM, then run object detections per frame, cast 3D rays from detections back into world space, and cluster/intersect those candidates in map coordinates. Final object locations are accepted only when multiple views agree (high inlier support, e.g., 8 consistent observations); low-support candidates are treated as false positives.
Video walkthrough
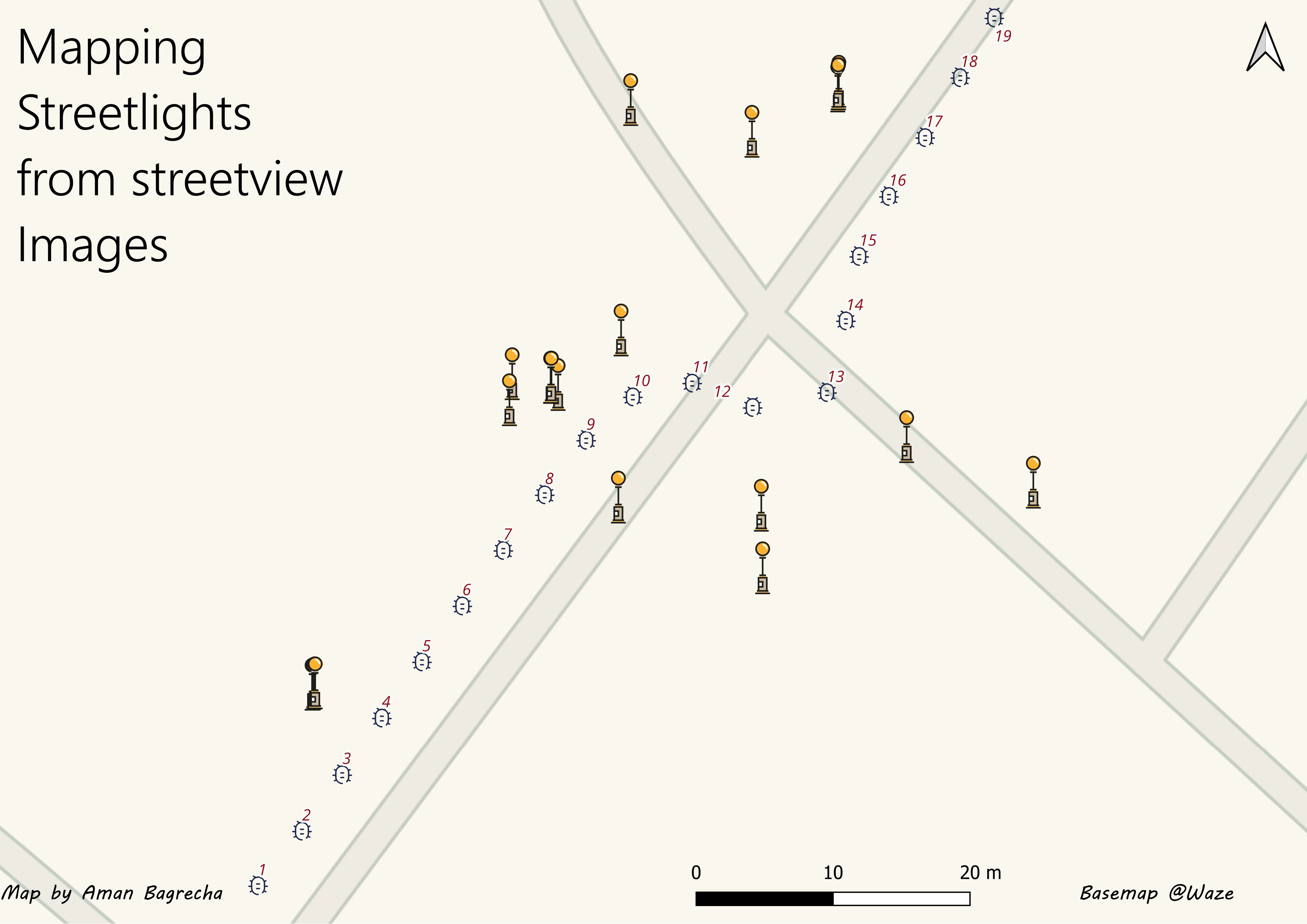
In the final localization stage, each candidate competes for multi-view agreement in map space.
